
Ex-Head of AI at Laplaces AI (now Maneva AI). On top of AI models and infrastructure development, I had the privilege of leading an outstanding team in creating value for our customers through our products. I would like to think that my work contributed to the strong momentum the company has built since my departure :)
I obtained my M.Sc. in Computer Science with AI specialization (Dean’s Honors List) at Mila/University of Montreal/Robotics and Embodied AI Lab (REAL) under the supervision of Prof. Liam Paull, and B.ASc. in Mechatronics Engineering (Dean’s Honors List, with Distinction) at the University of Waterloo. I have also been fortunate to collaborate with Dr. Anqi Xu on my current and past research works at Element AI (now part of ServiceNow Research I believe), as well as Prof. Florian Shkurti at the University of Toronto/Robot Vision and Learning (RVL) lab. My research focus was to develop learning framework for solving semantic visual navigation task, where I worked on Lifelong Topological Visual Navigation. In addition, I spent considerable time researching the topic of adversarial attacks and defenses, where I published PAT (ICCV’19), MJSMA (MAIS’18), and a review paper (pre-print). I was also lucky to have been concretely introduced to the research world by Prof. Jeff Orchard in the Neurocognitive Computing Lab during my undergrad days.
I enjoy presenting my work, so please feel free to let me know if you want to learn more about it! When I am not “working”, I like to play tennis, dabbling in industrial design, play music (mainly acoustic and electric guitars), make educational videos (OUTDATED), read books, writing blog posts (OUTDATED) or paper summaries (OUTDATED), and go for a run or hike.
Featured Publications
Please see my Google Scholar page for the complete list.
Lifelong Topological Visual Navigation
Rey Reza Wiyatno, Anqi Xu, Liam Paull
IROS + RA-L, 2022
Paper / Webpage / Blog
A learning-based topological visual navigation method with graph update
strategies that improves lifelong navigation performance over time.
Our model can also be finetuned and work well in the real world.

Adversarial Examples in Modern Machine Learning: A Review
Rey Reza Wiyatno, Anqi Xu, Ousmane Dia, Archy de Berker
arXiv, 2019
Paper / Adversarial Attack Blog / Adversarial Defense Blog
A review of adversarial attack and defense techniques.

Physical Adversarial Textures That Fool Visual Object Tracking
Rey Reza Wiyatno, Anqi Xu
ICCV, 2019
Paper / Video / Blog
Fooling object tracker in the real world with inconspicuous-looking textures.
Featured Applied Projects
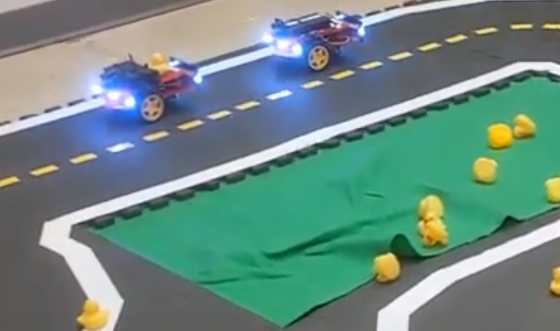
Duckietown: Lane Following with Other Vehicles and Obstacles
Course Project, AI Driving Olympics, 2019
Video
Lane following and collision avoidance using light-weight semantic
segmentation model and pure pursuit controller.
Inspeksi: Intelligent Manufacturing Visual Inspection Tool
Capstone Project
Winner of Autodesk Canada Capstone Design Award, 2019
Video
A low-cost solution for automated visual inspection tool.
![]()
Autonomous Drone Tracking
Work Project, 2018
Robot: Parrot Bebop 2
Video
Autonomous drone tracking using GOTURN and PID controller.